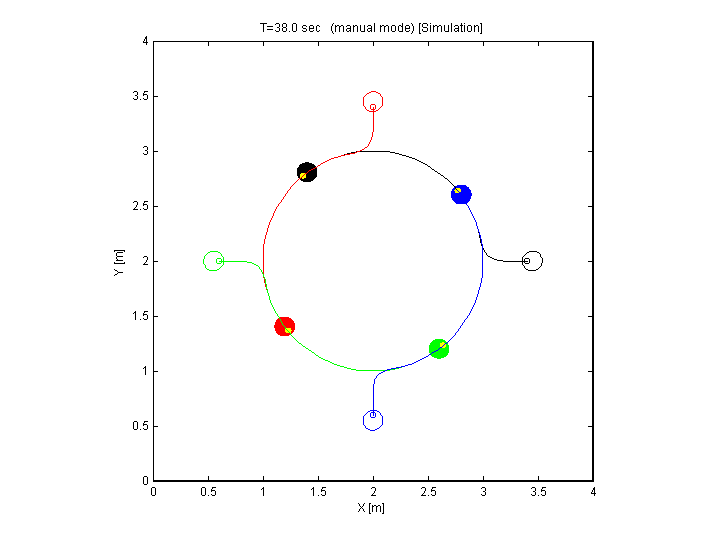
Four robots following a circular trajectory
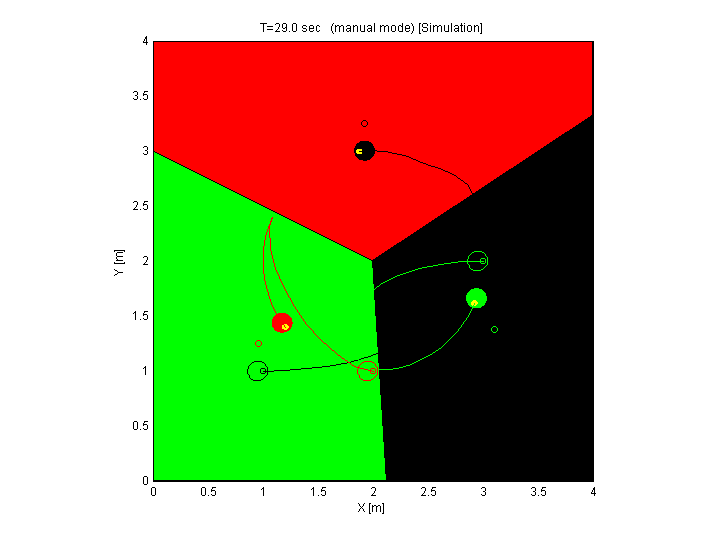
Coverage problem involving Voronoi cells
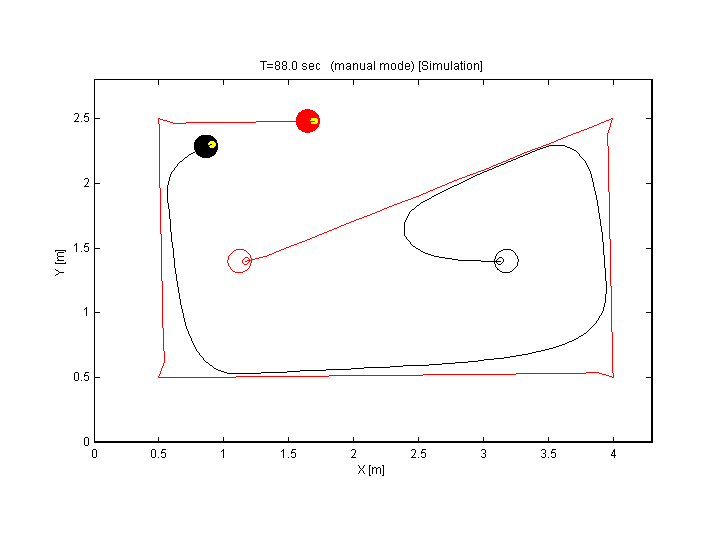
Pursuer-evader game (non-holonomic robots)
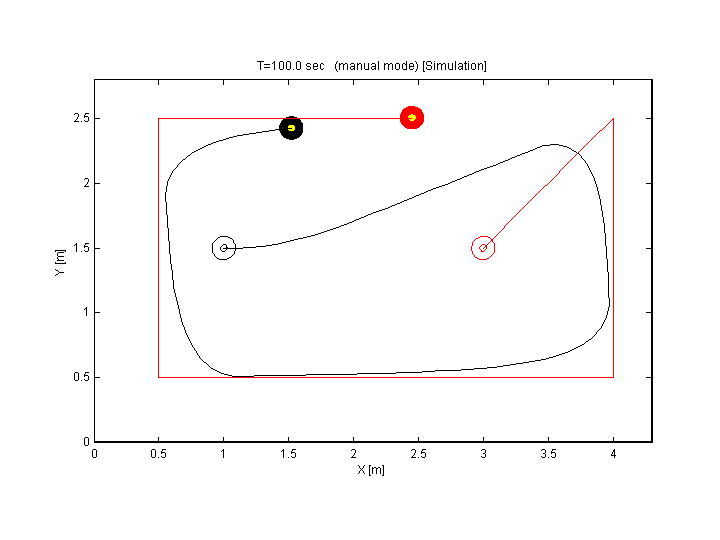
Pursuer-evader game (holonomic robots)
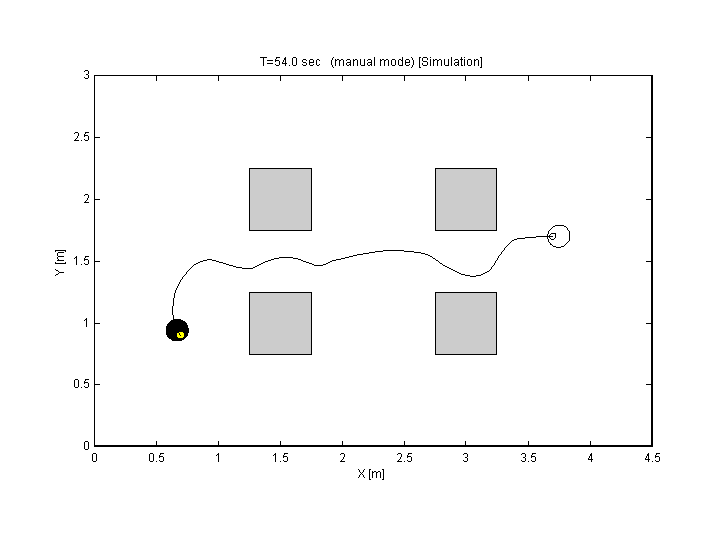
Obstacle avoidance
Robot equipped with sensor

Four robots following a circular trajectory
|
Coverage problem involving Voronoi cells
|
Pursuer-evader game (non-holonomic robots)
|
Pursuer-evader game (holonomic robots)
|
Obstacle avoidance
|
Robot equipped with sensor
|